


INTRODUCTION
Imagine detecting a passing bullet and its origination through an electric field (E-field) instead of an acoustic one. This is exactly what the U.S. Army has been investigating— electric-field based bullet detection systems that can identify the presence and range of a passing bullet as well as establish the direction of its origination point.
U.S. Warfighters need a real-time notification system to detect small-arms threat locations. The system must be accurate and effective in ambush scenarios and close-quarters urban combat environments. These include complex firefight environments involving multiple shooters, different weapons (single fire to full automatic, silenced guns, subsonic bullets), background detonations and explosions, and man-made noise/interference.
Existing first-shot detection systems are mainly based on acoustic sensing. Although arrays have demonstrated the ability to locate bullets relatively precisely, they may become saturated or degraded by reverberation and multipath propagation, multiple threat scenarios, high levels of acoustic noise, and/or vibration on vehicles. In addition, the systems do not detect the presence of subsonic bullets or bullets fired from “silenced” weapons. Their largest weakness for the U.S. Department of Defense (DoD) is that they may lose operational capability on the battlefield because of the high levels of background acoustic noise from tanks, planes, and munition explosions.
In addition to acoustic-based detection, it is possible to detect the muzzle flash of a bullet being fired with an optical array. In some instances, a very sensitive array under ideal conditions may even be able to detect the presence of a passing bullet by the friction it generates as it moves through air. However, the performance of such systems requires line of sight to the bullet and degrades in situations with multiple intense light sources, such as a battlefield environment. In addition, accuracy can be affected by suppression devices designed to change the character of the muzzle flash, like an acoustic silencing device.
E-FIELD-BASED BULLET DETECTION
When a projectile travels in space, triboelectric charges build up on its surface, and the moving charge creates an E-field that can be detected and tracked by a small array of E-field sensors. A traveling projectile very quickly rises to a significant electric potential due to combustion and triboelectric (frictional) static electric charging [1]. Since 2005, the U.S. Army Armament Research, Development and Engineering Center (ARDEC) and Army Research Laboratory (ARL) have been investigating E-field technology for bullet detection capability. ARDEC and ARL have performed extensive tests of this technology for accurate bullet detection of single and multiple gunshot events at different ranges with full automatic rapid fire, silencers, and subsonic rounds [2, 3].
U.S. Warfighters need a real-time notification system to detect small-arms threat locations.
The magnitude of the E-field signal on projectiles scales with increasing size of the projectile and the amount of initial combustion. The response of the sensor depends upon the distance of the closest approach and the relative angle between the sensor axis of symmetry and the path of the projectile. As a result, mutually orthogonal E-field measurements can be used to track the direction of the projectile and thus identify the origination point. Although the current research focus has been on bullets, an E-field-based system can also detect other projectiles such as rocket-propelled grenades (RPGs). Researchers at ARL have collected E-field signals from in-flight RPGs [4]. As expected, the projectiles were easily detected with the larger signal resulting from their bigger size.
The technology’s utility can be seen in Figure 1. The left is an acoustic measurement of a shot. The middle shows a second shot, but with the gun silenced. The microphone can no longer acquire clear information about the event. (Note that silencing Shot 2 does not impact measurement.) The right figure, however, shows E-field measurements of the two shots. The E-field sensor can acquire adequate data about the silenced shot to make it clearly detectable.

Figure 1: E-Field Measurement Sensing Silenced Bullets: (Left) Shot 1—Acoustic Detection, No Silencer; (Middle) Shot 2—Acoustic Detection, but Silenced Bullet; and (Right) Both Shots With E-Field Detection (Source: QUASAR Federal Systems).
Until recently, limitations of sensing technology have constrained the usefulness of this technique. Recent advances in E-field sensing technology have enabled the development and demonstration of a research-grade, Army-funded bullet detection system whose capabilities fill gaps left by the acoustic-based gunshot detection systems currently used. The system can not only detect bullets that are passing by its sensing apparatus but also has a direction indication display that tells the user where the shot originated. The system can function in noisy areas, including in the presence of multiple gunshots; in urban environments, where acoustic-based systems can be confounded by effects created as sound encounters multiple tall buildings; and with silenced firearms and subsonic bullets, which may evade acoustic detectors.
The system can not only detect bullets that are passing by its sensing apparatus but also has a direction indication display that tells the user where the shot originated.
ARDEC research personnel have used E-field sensors to detect signals from a wide variety of small arms fire, from 5.56 North Atlantic Treaty Organization rounds to .50-caliber Browning machine gun fire [4]. In some of these experiments, the sensors were mounted on a high-mobility, multipurpose wheeled vehicle (HMMWV – commonly known as a Humvee). Some of this work was conducted using high-sensitivity sensors from QUASAR Federal Systems (QFS) [5].
RECENT WORK
In December 2015, a complete prototype system built by QFS (Figure 2), including E-field sensors, a compact commercial-off-the-shelf DAQ/processor, and embedded software, demonstrated a detection capability of 98% for AR-15 gunshots passing the sensor node between 1 and 3 meters, with a 0% false alarm rate at a local live-fire range. The E-field gunshot location (EGL – eagle) system had a local LED display and remote LCD monitor displaying the detected hostile gunshot direction (angle of arrival) in real time. The EGL also detected rapid fire, crossfire, and subsonic rounds.
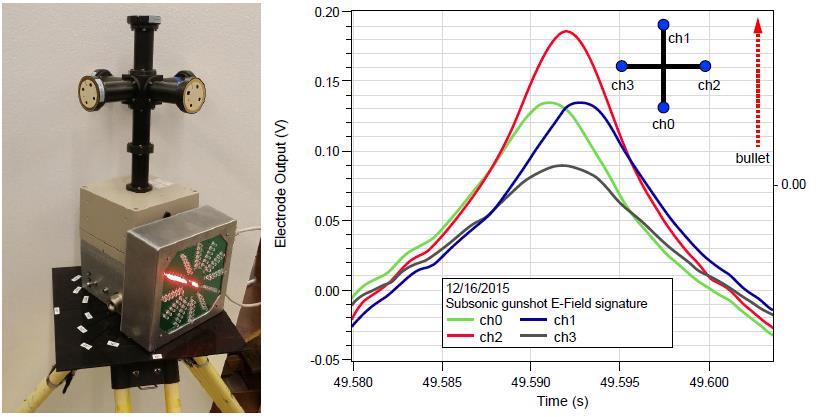
Figure 2: EGL system: (Left) E-Field Sensor Module With Five Electrodes for Gunshot Detection. The Circuit Modules and Power Are Enclosed. The LED Display Indicates the Direction of Bullet Origination in a Clock-Face Modality. (Right) E-Field Signatures on Four Electrodes Generated by a Passing Bullet (Source: QFS).
Researchers are also working on combining acoustic and E-field detection capabilities because the shockwave generated by a passing bullet arrives at a time delay equal to the passing distance/sound speed. It is therefore possible to use the shockwave to confirm that detected E-field pulses above the threshold are from bullets, thus lowering the false alarm rate. It is also possible with an acoustic-based system to use the shockwave to detect the bullets and an E-field measurement to confirm detection, again lowering the false alarm rate. This measurement modality combination can dramatically improve the performance of both types of gunshot detectors.
The algorithms, software, and hardware developed under this effort will have dual-use applications for all levels of law enforcement and other government agencies for Homeland Defense, with platforms such as vehicles, boats, helicopters, and on outposts. This system will be extremely useful in urban environments where high background noise may be encountered. Local and county police organizations that supported ARDEC in testing this technology have expressed great interest in its development and availability for police vehicles as well as for individual officers.
The eventual product can be used for military, law enforcement, and other government agencies for Homeland Defense. Since the product will be developed for shooter-bearing detection in a worst-case sensing scenario, it should be easily adaptable to many other scenarios. The product series is envisioned to include a system designed for mounting on a Humvee, one for a “defensive outpost,” and prototypes for man-portable applications. The compact nature and standalone capability of the eventual product means that it could later be used as a module in a large system, providing detection and reporting incoming bullets.
ADDITIONAL MODALITIES
In 2011, remote voltage sensors the size of two stacked pennies were mounted on a vehicular Objective Gunner Protection Kit (a type of gunner’s turret mounted on an armored vehicle), and tests to simulate close-quarters ambush conditions were performed. Detection accuracy for fired bullets was within a few degrees. Establishing that functionality can be obtained with small sensors enables mounting wearable modalities on a Warfighter’s torso and/or helmet. The Army has funded preliminary work mounting a helmet with sensors on a tripod and firing Airsoft pellets nearby to establish that signal fidelity from the helmet mock-up is adequate for the application (Figure 3). Measurements were also taken with the system on a walking person to establish that noise levels would not be too high for acquiring bullet signals in this modality. These tests established that the helmet configuration had adequate signal to detect bullets and noise in measurements on a walking subject would not prevent the system from functioning.
Establishing that functionality can be obtained with small sensors enables mounting wearable modalities on a Warfighter’s torso and/or helmet.
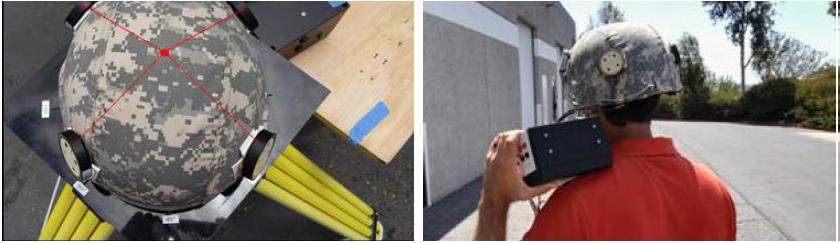
Figure 3: Body-Worn System Concept Testing: (Left) Sensors Mounted on a Helmet and (Right) Noise Measurement Setup (Source: QFS).
CONCLUSION
The DoD uses a variety of technologies for bullet detection and location, but the systems are all subject to certain areas of weakness. High battlefield activity/ urban environments can confound acoustic and optical systems, impairing their accuracy. Silencing/light damping devices can disguise the bullet’s signature to the point where systems cannot detect it. E-field based sensing offers an alternative detection/location method that can overcome these weaknesses, serve as a standalone system, and complement and enhance existing technology.
References:
- Stanford Research Institute. “Measuring the Electrical Charge and Velocity of a Moving Projectile.” Rep. AD 612797, January 1965.
- Owens, L. E., R. Kinasewitz, J. Burke, and Y. Zhang. Proceedings of the 2007 Meeting of the Military Sensing Symposia (MSS) Specialty Group on Battlespace Acoustic & Seismic Sensing, Magnetic & Electric Field Sensors, Laurel, MD, August 2007.
- Owens, L. E., et. al. Proceedings of the 2009 Meeting of the Military Sensing Symposia (MSS) Specialty Group on Battlespace Acoustic & Seismic Sensing, Magnetic & Electric Field Sensors, Laurel, MD, August 2009.
- Vinci, S., and D. Hull. “Electrostatic Charge Measurements and Characterization of In-flight RPGs.” Proceedings of the 2004 Meeting of MSS Specialty Group on Battlespace Acoustic and Seismic Sensing, Magnetic and Electric Field Sensors, 2004.
- QUASAR Federal Systems. www.quasarfs.com, 2018.